Agisoft PhotoScan中文破解版
v1.2.5 已注册版大小:90.22 MB更新:2019/03/01
类别:3D制作类系统:Winll
分类分类
大小:90.22 MB更新:2019/03/01
类别:3D制作类系统:Winll
部分杀软报毒,建议关闭后使用注册机
解压密码:www.itmop.com
Photoscan是可以将2D照片扫描成三维模型的软件,本次更新的中文破解版,你可以自由无限制的使用,手动将语言改成中文版,清楚明白功能齐全,快来IT猫扑下载吧!
Photoscan是一款3D扫描软件,其可基于影像自动生成高质量三维模型,用户无需设置初始值,无需相机检校,它根据最新的多视图三维重建技术,可以对任意照片进行处理,无需控制点,也可以通过给予的控制点生成真实坐标的三维模型。用户的照片的拍摄位置可以是任意的,无论是航摄相片还是高分辨率数码相机拍摄的影像都可以使用,整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。软件独特的三维重建技术,可以根据用户添加的多张图片自动生成真实坐标的三维模型,而且不需要设置任何初始值,就可以将2D的图片转换成3D模型。比起以前用3dsmax进行这种全景来说,该软件无疑是方便许多,整个建模的过程全部都是自动进行的,而且添加不同方位的照片越多建立的模型精度也越高,无论是航拍相片还是数码相机都可以用它进行处理。除此之外,软件还具备纹理网格模型重建的功能,可以生成高分辨率的地理正交影响,用户只需要简单的控制坐标就可以生成专业级的三维模型。有了它可以说,不管是专业人士还是业余人士都可以在短时间内,从上百张图片中获取测量数据。
1、用户需根据自己的操作系统进行选择安装,如64位则双击“dayanzai.me.photoscan-pro_1_2_5_x64.msi”开始正式安装
2、自动弹出安装界面,点击“Next”

3、勾选“Iacceptthetermsinthelicenseagreement”即同意此协议,完成点击Next

4、选择相应的要安装的功能,建议直接默认点击Next

5、点击“install”开始正式的安装

6、安装的时间可能过长,请耐心等待

7、安装完成,开始下一步的汉化和破解

8、由于用户都是默认安装,一般在C盘ProgramFiles中的Agisoft里,打开程序弹出输入注册码窗口,先暂时将其放置一边

10、回到安装包,进入KeymakerCORE文件夹,双击打开“keygen.exe”注册机,首先Name随意填写,然后点击Generate生成注册码

11、将生成的注册码,鼠标右键将其复制,然后回到刚才弹出的注册码窗口,将其粘贴,点击“ok”即可,但是需要注意目前粘贴只支持一格一格粘贴,所以用户需要粘贴多次,同时记住不要把“-”也粘贴进入哦

12、完成破解,现在用户可完全无限制的使用此软件啦

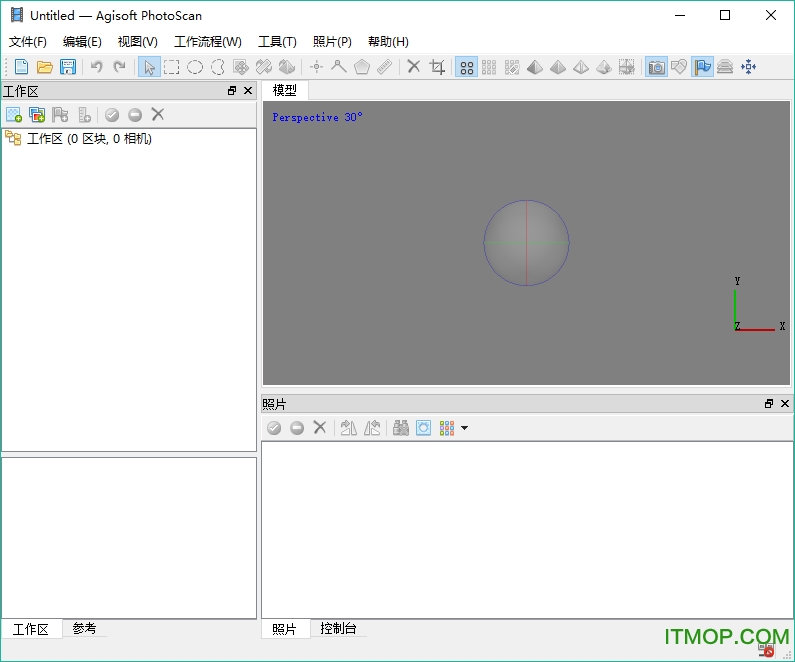
1、初次启动的时候,界面都会是英文状态,选择上面菜单中的tools,点击Preference进入到软件设置中

2、将这里的语言改为chinese点击ok就会变成中文

空中三角测量
生成多边形Mesh网模型(普通/彩色纹理)
设置坐标系统
生成真实坐标的数字高程模型(DEM)
生成真实坐标的正射影像
一、摄影三角测量
1、处理各类图像:航空(最低点,斜)/近距离。
2、自动校准:框架(含鱼眼)/球形摄像机。
3、支持多摄像头项目。
二、点云编辑与分类
1、对准确的结果进行精心的模型编辑。
2、对点分类,定制几何重建。
3、经典的点数据处理工作流程更利于.LAS输出。
三、DSM/DTM
1、数字表面和/或数字地形模型-根据投影。
2、地理参考基于EXIF的元数据或飞行记录的GPS/控制点数据。
3、EPSG记录坐标系支持:WGS84,UTM,等等。
四、真正射影像
1、地理参考:GIS兼容的GeoTIFF格式;谷歌地球的.KML文件。
2、大项目批量输出。
3、对均匀纹理进行颜色校正
五、三维测量
1、内置工具可以测距,测面积、体积
2、对于更复杂的测量分析,PhotoScan可以顺利的导出到外部工具,因为它支持多样的输出格式
六、GCP控制点:高精度测量
1、GCPs控制结果精度
2、编码/非编码的目标自动检测便于控制点的快速输入
3、不用定位设备,利用比例尺工具来设置参考距离
七、二次开发
1、除了批量处理-一个节省人工干预的方法,python脚本定制选项:
2、几个类似的数据集形成一个参数模板;
3、中间处理结果检查;等等
八、多光谱影像分析
1、RGB/近红外光谱/热/多光谱图像处理。
2、基于更好的渠道的快速重建。
3、多通道正射影像输出方便进一步的归一化植被指数计算和分析。
九、精细纹理
1、各种场景:考古遗址、文物、建筑物、内饰、人,等等。
2、直接上传Verold和Sketchfab资源。
3、纹理:HDR和多文件,超级详细的可视化。
十、4D时序
1、多相机站数据处理在电影艺术,游戏产业等创建项目。
2、依据大量的视觉效果与时间序列进行3D模型。
十一、全景拼接
1、三维重建的捕获数据来自同一个相机位置——相机站,提供至少2相机站。
2、360°全景拼接为一个相机站数据
十二、分布式和GPU计算
分布式计算在计算机网络中,使用多个节点的联合力量,处理一个项目中在巨大的数据集。
autocad 2014注册机3D制作类590.00 KB32&64位
详情Autocad2018 64位3D制作类2.25 GBv0.49.0.0 免费中文版
详情autocad2014 64位注册机(cad2014激活码生成器)3D制作类303.00 MB绿色版
详情AutoCAD2018注册机最新版3D制作类335.00 KBv1.0 绿色版
详情cad2019注册机32位+64位3D制作类2.00 MB支持64位/32位
详情AutoCAD2007注册机3D制作类58.00 KB32位&64位
详情64位CAD2010注册机3D制作类152.00 KB
详情autocad2007免费版3D制作类500.00 MB简体中文免注册免激活版
详情autocad2017注册机3D制作类770.00 KB32位/64位
详情AutoCAD2012注册机3D制作类390.00 KB64位/32位通用版
详情autocad2014 64位3D制作类1.17 GB简体中文版
详情AutoCAD2010激活注册机3D制作类153.00 KB绿色免费版
详情Autodesk AutoCAD 2018 64位3D制作类2.34 GB简体中文正式版
详情CorelDraw X43D制作类92.51 MBv14.0.0.701 SP2 官方中文精简版
详情coreldraw x8精简版(32位/64位)3D制作类743.00 MB中文绿色版
详情coreldraw x7中文破解版3D制作类341.00 MB绿色精简版
详情autocad2007精简版3D制作类164.00 MB简体中文注册版
详情autodesk autocad2018 64位破解版3D制作类549.00 MB珊瑚海简体中文精简版
详情Autocad2012简体中文破解版(64位)3D制作类1.36 GB免费版_附注册机序列号
详情中望cad2020中文版3D制作类793.00 MB免激活码破解版
详情点击查看更多
autocad 2014注册机3D制作类590.00 KB32&64位
详情cad2019注册机32位+64位3D制作类2.00 MB支持64位/32位
详情autocad2014 64位注册机(cad2014激活码生成器)3D制作类303.00 MB绿色版
详情AutoCAD2012注册机3D制作类390.00 KB64位/32位通用版
详情coreldraw x8注册机3D制作类2.35 MB32位/64位 免费中文版
详情cad计算总长度插件lsp(cad线长度统计)3D制作类219.00 KB免费版
详情AutoCAD2018注册机最新版3D制作类335.00 KBv1.0 绿色版
详情autocad2017注册机3D制作类770.00 KB32位/64位
详情Autocad2018 64位3D制作类2.25 GBv0.49.0.0 免费中文版
详情广州数控GSK980TD车床仿真软件3D制作类90.10 MB官方版
详情CorelDraw X43D制作类92.51 MBv14.0.0.701 SP2 官方中文精简版
详情cad清理插件dicts.lsp3D制作类2.00 KB免费版
详情Autodesk AutoCAD 2018 64位3D制作类2.34 GB简体中文正式版
详情autodesk 3d max 2018注册机3D制作类763.00 KB免费版_32位/64位
详情AutoCAD2016注册机3D制作类594.00 KB32位/64位通用版
详情autocad2020注册机绿色版3D制作类395.00 KBx64位
详情Adobe2020全系列注册机3D制作类20.79 MB通用免费版
详情coreldraw x7注册机3D制作类2.35 MB32位/64位 免费中文版
详情coreldraw x6 注册机3D制作类325.00 KB32位/64位 免费中文版
详情Autodesk Maya 2019注册机3D制作类14.30 MB32/64位
详情点击查看更多
cinema 4d r17破解版3D制作类6.95 GB完整版
详情CAD绘图软件CorelCAD 20213D制作类506.00 MBv21.2.1.3523 官方中文版
详情小狐狸等分线计算器3D制作类253.00 KBv1.0 中文绿色版
详情CorelDraw X43D制作类92.51 MBv14.0.0.701 SP2 官方中文精简版
详情AnyCAD Free(三维建模)3D制作类14.00 MBv1.7 绿色免费版
详情Blender 3D的建模软件(支持多边形画图/做动画)3D制作类213.82 MBv3.2 官方正式版
详情3dmax场景助手3D制作类180.00 KBv4.1.1 官方版
详情Structure Synth(最小的3D分形软件)3D制作类4.30 MBv1.5.0 官方版
详情caxa 3d实体设计20163D制作类1.95 GB简体中文免费版
详情实时渲染软件(Keyshot)3D制作类415.00 MBv5.0 中文破解版
详情PROE三维建模3D制作类1.79 GB官方中文版
详情Lumion7 pro3D制作类600.00 MBv7.0 中文版
详情算算量3D制作类11.90 MBv6.0.19 免费版
详情autocad2007免费版3D制作类500.00 MB简体中文免注册免激活版
详情autocad2014 64位3D制作类1.17 GB简体中文版
详情autocad 2017精简版3D制作类822.90 MB32位/64位 珊瑚海中文破解版
详情Adobe Animate 2022特别版3D制作类1.90 GBv22.0.4 官方最新版
详情富怡服装CADv9破解版3D制作类430.00 MB企业版
详情草图大师精品客厅定制模型3D制作类33.50 MB免费版
详情surfer12汉化破解版643D制作类101.60 MBv12.7.984 免费版_含注册码/序列号
详情点击查看更多
























































71
回复云南保山电信 - 网友
非常感谢
71
回复云南保山电信 - 网友
非常感谢